
by Stephanie Baum , Medical Xpress
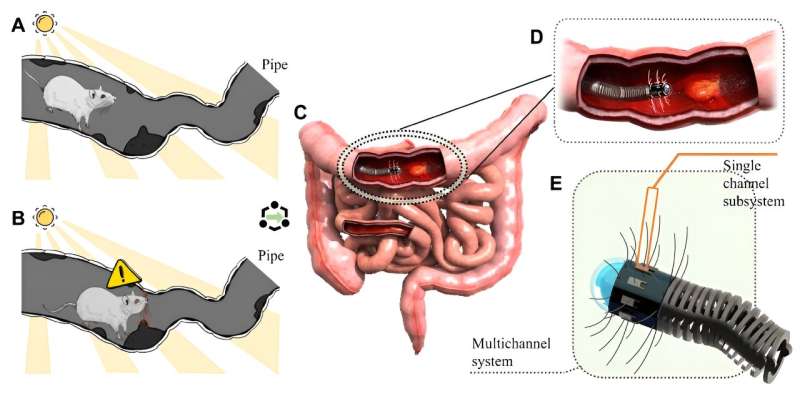
The conceptual design of the proposed artificial whisker-based method inspired by rat whiskers offers a promising approach for GI disease screening. A, B Illustrate the working mechanism of rat whiskers when they travel through a lightless pipe-like environment. C A simulated intestinal tract with pathological changes. D, E Demonstrate the proof-of-concept design of the proposed artificial whisker system, and the clinical screening routine with the proposed system. Here, we focus on a single channel subsystem, which could also assist clinical diagnosis. Credit: npj Robotics (2023). DOI: 10.1038/s44182-023-00003-8
Gastrointestinal (GI) diseases, whose symptoms can be varied and painful, may lead to serious health problems, and present a formidable health challenge throughout the world. For these diseases, early diagnosis and intervention are crucial for treatment success and mortality risk reduction.
Existing diagnostic modalities for GI disease are typically optical, and subject to limited image quality. Furthermore, they do not have the ability to provide information on tissue abnormalities such as stiffness or structural issues.
However, a research team from Imperial College London and Fudan University in Shanghai has proposed a new tactile sensory diagnostic method that may complement or even enhance existing optical modalities. Their work is published in npj Robotics.
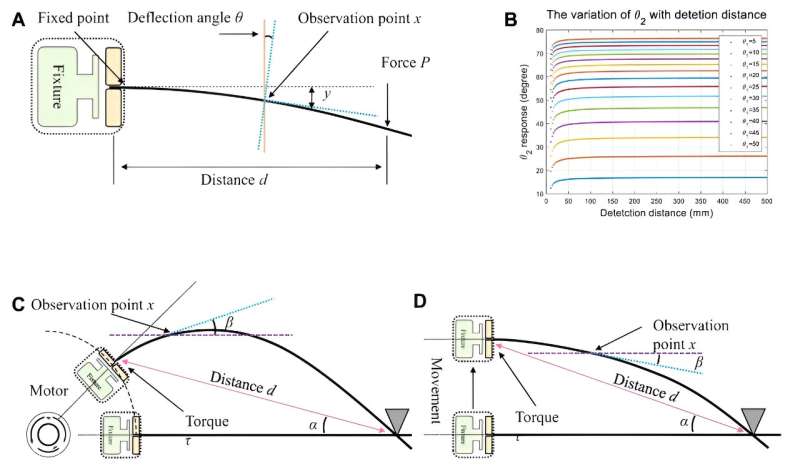
The modeling analysis of an artificial whisker-based system, including static and dynamic models, which provides insights into its working mechanism. A The static model of the whisker system. Generally, the artificial whisker can be modeled as a cantilever beam with a free end, which satisfies the Bernoulli-Euler equation. The static indicates the fixture is fixed during the sensing stage. B An analytical solution of the localization accuracy problem in the static model. This design will lead to indistinguishable flexion angle changes on which the system relies to complete distance perception as the distance between the whisker and the target increases. C A motor-driven dynamic model of whisker system, which can provide more robust sensing capability while at the cost of large volume and difficult to be highly integrated. D A variant dynamic model utilizing external movement force to drive it, featured by higher integration and robustness. Credit: npj Robotics (2023). DOI: 10.1038/s44182-023-00003-8
Existing diagnostic modalities and their limitations
Conventional endoscopy is a minimally-invasive, currently- and widely-used screening method by which clinicians can use a flexible scope fitted with a small camera to look for signs of disease within a patient's GI tract. However, because endoscopy is a vision-based method, the dark and constricted environment in which it operates may impair the quality of the images it can provide.
Another method is wireless capsule endoscopy, in which a patient swallows a tiny camera capsule that can wirelessly transmit images to clinicians for diagnosis. Though capsule endoscopy is recognized as a complementary screening method that is low-cost, easy to use, and minimally intrusive, the images it provides are subject to quality issues similar to those of conventional endoscopy. Moreover, conventional endoscopy may still be required to establish a detailed diagnosis after capsule endoscopy.
Researchers have also developed and tested various chromoendoscopy methods, but these are subject to similar image quality issues and may require the use of biocompatible dye agents, which is not always feasible. In addition, one chromoendoscopy method yielded research results showing no improvement in polyp detection rates.
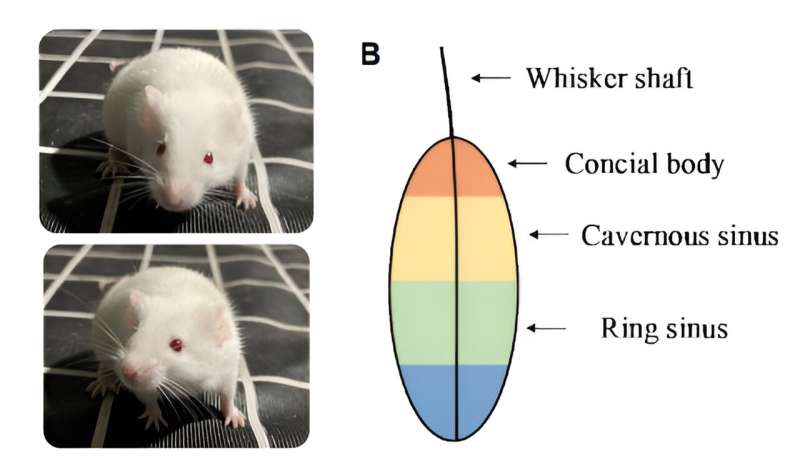
The rat and the anatomy structure of follicles. (A)The rat whisker plays a crucial role in sensing and navigation capability in the real world. (B) several mechanoreceptors in follicles. Credit: npj Robotics (2023). DOI: 10.1038/s44182-023-00003-8
How rat whiskers can inform a new diagnostic modality
Meanwhile, the researchers of this new proposal took inspiration from the sensory mechanism of rat whiskers. Some background: Rats have poor eyesight. Just as humans may use their fingertips, rats use their whiskers to help them perceive information about their physical surroundings, which are often dark and confined.
Knowing that artificial whiskers developed for previous research had performed well in tasks involving distance perception and texture discrimination, the research team saw an opportunity for their use in GI disease screening. The npj Robotics proposal outlines "a biomimetic artificial whisker-based hardware system with artificial intelligence-enabled self-learning capability" for this purpose.
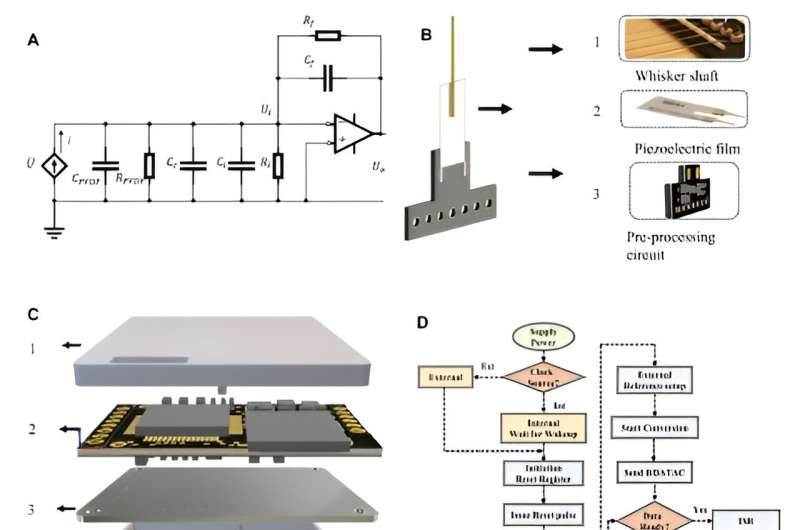
The design of the proposed hardware system for artificial whisker-based sensing, which comprises a whisker-based sensor, signal conditioning circuits, and the embedded control algorithm. A A pre-processing circuit (labeled as 3 in B), a charge amplifier, is designed to achieve impedance matching, as well as the charge to voltage signal conversion. B The structure of the whisker-based sensor. In this design, a guitar string, consisting of a thin core with wire wrapped around it, is used as a whisker shaft. A PVDF film is used as a transducer utilizing piezoelectric properties given its large dynamic range. C The structure of the signal conditioning circuit contains a 3D printing upper shell (labeled as 1), a PCB board of the signal conditioning circuit (labeled as 2), a Li-ion battery (labeled as 3), and a 3D printing lower shell (labeled as 4). D Flowchart of the embedded control program for command transmission and data exchange. E The framework of the signal conditioning circuit, which contains an AFE system, MCU system, and a power supply system. SPI protocol is used for timing control, data/instruction interaction between the MCU and the AFE system. Credit: npj Robotics (2023). DOI: 10.1038/s44182-023-00003-8
Whisking and AI
The follicles in which rat whiskers are rooted are largely responsible for their sensory ability. Incorporating this knowledge, the team designed and tested several static and dynamic hardware system versions, which they discuss in their paper. They ultimately determined that a dynamic model with externally-driven movement (as opposed to movement driven by a mounted motor, which they also evaluated) would provide the best sensing capability for diagnostic purposes.
The proposed model would incorporate continuous whisking movement to provide information based on distance perception rather than precise localization.
"Based on this idea, a deep learning algorithm is developed for nonlinear parametric mapping in terms of the output signal and the parameters of interest, such as textural information, hardness, and distance estimation, in this way, to translate the output into the relevant information to assist clinical diagnosis," the research states.
In great detail, the paper discusses the proposed model as well as the researchers' benchmark experiments on evaluations of inherent noise and core function. It also describes the research team's pilot study, whose stated test accuracy results "averaged 94.44% with 0.9167 kappa."
The team concludes that by providing details on the structure and texture of the GI tract, their proposed tactile method could greatly improve on or work with current optical diagnostic modalities. The researchers suggest that further study of the artificial whisker's mechanical and physical properties, as well as the system design of accompanying multi-channel hardware, could help bring this diagnostic method to fruition.
More information: Zeyu Wang et al, Tactile perception: a biomimetic whisker-based method for clinical gastrointestinal diseases screening, npj Robotics (2023). DOI: 10.1038/s44182-023-00003-8
© 2023 Science X Network




Post comments