
by Beijing Institute of Technology Press Co., Ltd
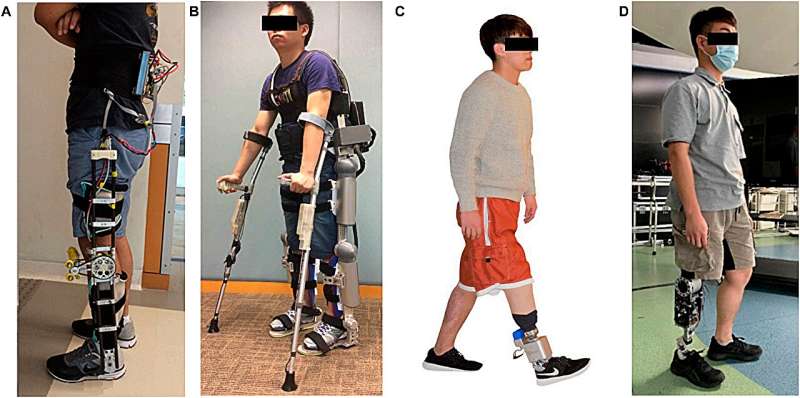
(A) Assistive knee brace, (B) CUHK-EXO, (C) ankle-foot prosthesis, and (D) transfemoral prosthesis. Credit: Ming Yin, State Key Laboratory of Digital Medical Engineering, School of Biomedical Engineering, Hainan University.
A research paper by scientists at Hainan University proposed FSS-eq2Seq as a 2-stage strategy for gait synergy modeling in lower limb assistive devices to achieve synergic and user-adaptive trajectories that improve human-machine interactions.
The new research paper, published on Jul. 3 in the journal Cyborg and Bionic Systems, indicatedSeq2Seq outperforms LSTM, RNN, and GRU in both interlimb and intralimb synergy modeling. Further, FS significantly improves Seq2Seq's modeling performance.
The concept of gait synergy provides novel human-machine interfaces and has been applied to the control of lower limb assistive devices, such as powered prostheses and exoskeletons. Specifically, based on gait synergy, the assistive device can generate/predict the appropriate reference trajectories precisely for the affected or missing parts from the motions of sound parts of the patients.
Optimal modeling for gait synergy methods that involves optimal combinations of features (inputs) is required to achieve synergic trajectories that improve human-machine interaction. However, previous studies lack thorough discussions on the optimal methods for synergy modeling. In addition, feature selection (FS), which is crucial for reducing data dimensionality and improving modeling quality has often been neglected in previous studies.
"Control of active assistive devices is a critical and challenging issue when designing and generating user-, temporal-, and phase-adaptive and synergistic reference trajectories for various patients," explained study author Fengyan Liang, a professor at Hainan University.
The researchers comprehensively investigated modeling methods and FS using 4 up-to-date neural networks: sequence-to-sequence (Seq2Seq), long short-term memory (LSTM), recurrent neural network (RNN), and gated recurrent unit (GRU). They also conducted complete FS using 3 commonly used methods: random forest, information gain, and Pearson correlation.
"Our findings reveal that Seq2Seq (mean absolute error: 0.404° and 0.596°, respectively) outperforms LSTM, RNN, and GRU for both interlimb and intralimb synergy modeling. Furthermore, FS is proven to significantly improve Seq2Seq's modeling performance (P < 0.05). FS-Seq2Seq even outperforms methods used in existing studies," said the study authors.
The present study aimed to identify the optimal modeling method and feature combinations for modeling interlimb and intralimb synergies to generate desirable trajectories for the control of lower limb assistive devices. "Consequently, a 2-stage strategy, FS-Seq2Seq, is proposed for gait synergy modeling in trajectory generation on assistive devices," said Liang.
Previous synergy modeling studies have not comprehensively compared the modeling methods and neglected the FS processes. This study emphasizes the promise of synergy-based trajectory prediction for assistive devices and provides insights into achieving optimal modeling with optimal feature combinations, resulting in synergic and user-adaptive trajectories that improve human-machine interactions.
The work demonstrates FS-Seq2Seq as a 2-stage strategy offers advantages over other approaches in terms of performance and accuracy for modeling interlimb and intralimb synergies. This study emphasizes the promise of synergy-based trajectory prediction for assistive devices to achieve synergic and user-adaptive trajectories that improve human-machine interactions.
The results further emphasize the importance of conducting systematic FS before synergy modeling in future studies. Future research efforts should hence continue to explore and refine these techniques to further improve assistive device control.
Authors of the paper include Liang, Lifen Mo, Yiou Sun, Cheng Guo, Fei Gao, Wei-Hsin Liao, Junyi Cao, Binbin Li, Zhenhua Song, Dong Wang, Ming Yin
More information: Fengyan Liang et al, Interlimb and Intralimb Synergy Modeling for Lower Limb Assistive Devices: Modeling Methods and Feature Selection, Cyborg and Bionic Systems (2024). DOI: 10.34133/cbsystems.0122
Journal information: Cyborg and Bionic Systems
Provided by Beijing Institute of Technology Press Co., Ltd





Post comments