
by National Institute of Biomedical Imaging and Bioengineering
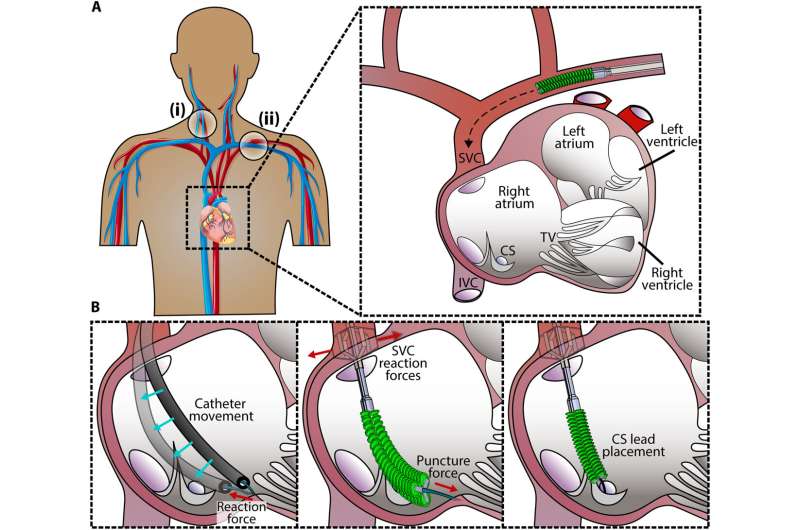
Clinical workflow for the demonstrated device applications.(A) The device moves toward the right atrium through the superior vena cava via one of two peripheral access sites: (i) the right internal jugular vein or (ii) the left subclavian vein. (B) Left: Illustration of current challenges with conventional catheters, where intrinsic flexibility makes it challenging to apply forces and accurately control position. Middle: The proposed device can self-stabilize against the superior vena cava to minimize losses in distal force generation. This stabilization, as well as the soft robotic tip, enables the user to perform procedures such as tricuspid valve annular anchor implantation and coronary sinus pacemaker lead placement. The robot is illustrated deploying an anchor into the tricuspid valve annulus. Right: The robot is illustrated guiding a guidewire into the coronary sinus. Credit: Science Advances (2023). DOI: 10.1126/sciadv.adi5559
A beating heart makes for a formidable surgical arena, but a new robotic catheter could someday equip surgeons to operate in the cardiac environment with greater ease.
The device, designed by a team of physicians and engineers at Boston University, possesses shape-shifting capabilities that allow it to be maneuvered through complex anatomy while maintaining enough stability to accomplish surgical objectives within the heart.
In a study published in Science Advances, the authors demonstrated the robot's ability to assist with two mock cardiac procedures using animal tissue. The study authors suggest that, with further development, the robotic catheter could make many common heart surgeries far safer and less taxing on the body.
"The authors carefully consider patient safety in their design, which creatively integrates several robotic features to navigate an environment that can be complicated and risky to operate in," said Moria Bittmann, Ph.D., director of the NIBIB Robotics Program.
Today, a significant amount of cardiac procedures performed in the U.S. are open-heart surgeries, which grant surgeons a high degree of control but also entail extensive recovery periods and are not an option for some high-risk patients.
Less invasive methods, wherein surgeons thread catheters through the body's vasculature to reach the heart, are available but come with serious drawbacks. These instruments, while small enough to fit through peripheral veins, are easily pushed aside by beating heart tissue due to their size. In general, they lack dexterity, making it difficult for surgeons to reach the target tissue.
This application has stumped researchers working on new solutions as it seemingly calls for an instrument with diametrically opposed properties—such as being both small and large and being both rigid and maneuverable.
To solve the puzzle, senior author Tommaso Ranzani, Ph.D., a professor of mechanical engineering at Boston University, and his colleagues created a robotic system that exhibits specific qualities as needed during a procedure.
The team's robotic catheter features a flexible, air pressure-operated tip, thin enough to fit inside veins but also capable of inflating once inside the heart. For added stability, they incorporated an expandable ring that, once deployed, would push up against the walls of the vein near the entrance of the heart, anchoring the catheter in place.
With the stabilizing mechanism and an inflatable tip, the authors reasoned the tool would be able to exert enough force to pierce beating heart tissue without being knocked back, Ranzani said. Then, the catheter could collapse both its stabilizer and tip to make an easy exit.
To test the device in a setting with realistic anatomy, the researchers used it to take on two different cardiac procedures within an ex vivo pig heart's right atrium, one of the heart's four chambers.
The first was a common procedure called a pacemaker lead placement, wherein a guidewire for a pacemaker lead is inserted into the wall of the right atrium.
Five different inexperienced operators used the robotic catheter to perform the procedure several times using hearts extracted from adult pigs. For comparison, an experienced physician using a standard catheter carried out the same task.
All five inexperienced operators were able to complete the procedure, and, on average, did so in a similar length of time as the expert.
The next trial for the robotic tool was the first step of a tricuspid valve repair procedure— a much more challenging operation usually conducted through open-heart surgery. The procedure normally involves fastening a ring around an opening and closing heart valve.
Since the researchers were not experimenting on living, beating hearts, they connected a tricuspid valve taken from a pig to a small motor, causing the valve to pulse. With the beating valve as their target, a researcher simulated the procedure's initial step of anchoring the ring by puncturing the valve in a predetermined spot, repeating the process three times.
The test was successful as the instrument was able to maintain contact with and apply force to its moving target throughout.
Next up, the authors plan to bring the technology into live subjects and tackle procedures of higher complexity, gathering additional data with the ultimate goal of lessening the need for taxing, open-heart surgical procedures.
"As we discuss these results with physicians working in the field, we see a high level of enthusiasm and hear of more and more applications for this technology," said Ranzani. "I think generally that this strategy is taking us in the right direction."
More information: Jacob Rogatinsky et al, A multifunctional soft robot for cardiac interventions, Science Advances (2023). DOI: 10.1126/sciadv.adi5559
Journal information: Science Advances
Provided by National Institute of Biomedical Imaging and Bioengineering



Post comments