
by Bob Yirka , Medical Xpress
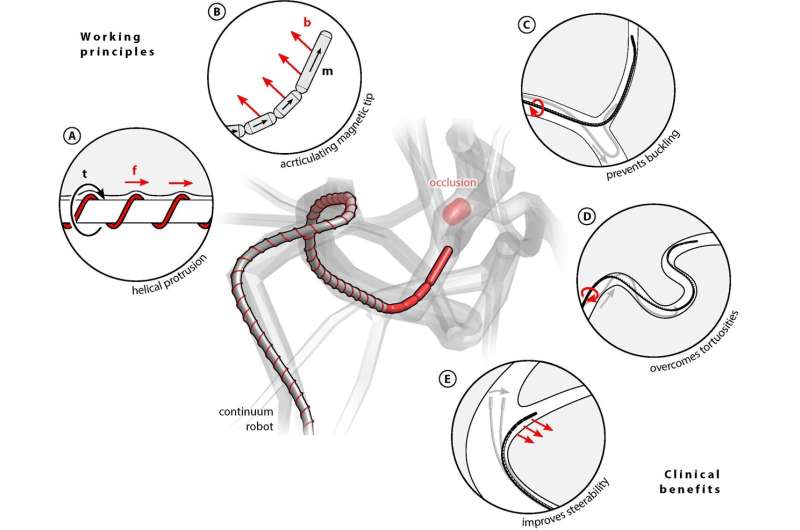
Helical mCR with articulated magnetic tip. (A) The helical protrusion on the outer surface of the continuum robot, upon rotation, pushes the robot tip forward. (B) The segmented articulating magnetic tip increases the magnetic volume and decreases bending stiffness for improved steerability. (C) The helical robot prevents buckling and (D) overcomes tortuous vessels. (E) The articulating tip allows for large tip deflections. Credit: ETH Zurich
A team of roboticists at Multi-Scale Robotics Lab, ETH Zurich, working with several hospitals in Switzerland, has developed a magnetically operated robot that could potentially be used to treat people after a stroke. Their paper is published in the journal Science Robotics.
In ischemic strokes, an obstruction (typically a blood clot or plaque) becomes lodged in tiny vessels in the brain. The result is a blockage, which prevents blood from flowing to the brain, killing brain cells. Such strokes can cause brain damage and sometimes death. Treating them is extremely time-sensitive—the longer it takes to remove the blockage, the more brain damage occurs.
Current treatments involve drugs that can break up the mass causing the blockage or use of a guide wire inserted into a femoral artery and pushed until its tip reaches the blockage. Both therapies take time, which means brain cells die waiting for blood to reach them. In this new effort, the research team developed a new approach that allows for a much more rapid response.
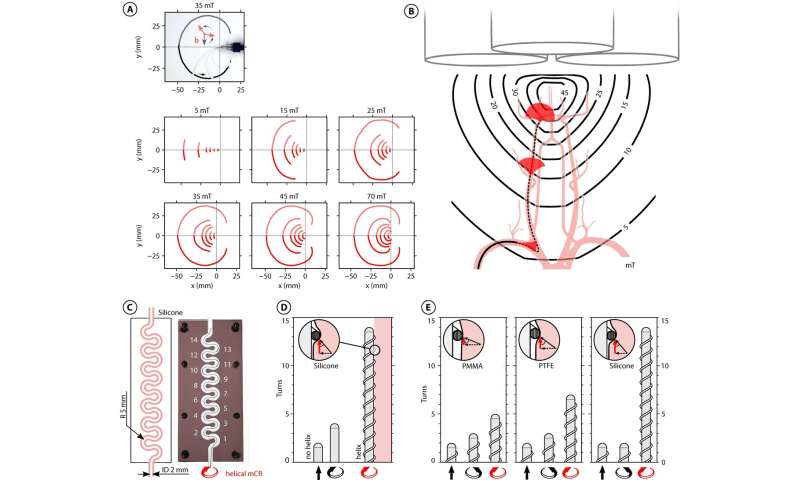
Workspace and helix effectiveness measurement of the helical mCR. (A) A sweep of parameters and tip tracking reveal the reachable workspace at different magnetic field magnitudes. (B) The mCR reachable workspace when navigating the supraaortic arteries and actuated by a three-coiled eMNS. (C) The flat vessel model with interchangeable lumen material: PMMA, PTFE, and silicone. (D) The comparison between a helical device actuated by rotation in a clockwise direction and a device without helical protrusion, actuated by translation and rotation. The helix engages with the soft material and, when rotated, generates a forward pushing force. (E) The helix effectiveness: The continuum robot is inserted as far as possible into three tortuous vessel models with three different materials for different engagement levels (PMMA, PTFE, and silicone). For each model, the mCR is inserted in three ways, first by pushing only, then while rotating counterclockwise, and lastly while rotating clockwise. Credit: ETH Zurich
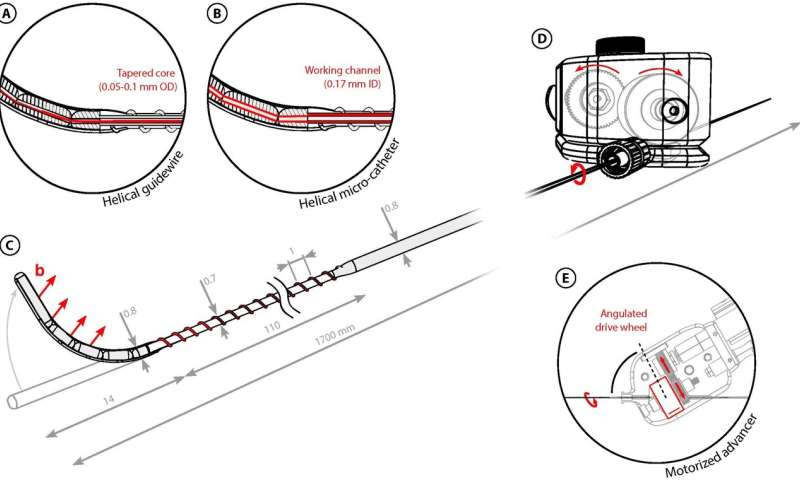
Helical mCR and advancer design. (A) A magnified view of the guidewire helical mCR with a tapered nitinol core (red) for stiffness optimization. (B) A magnified view of the microcatheter helical mCR with working channel (red) for fluid injection. (C) The helical mCR has a flexible, magnetic tip with articulating links and a helical protrusion on its outer surface. (D) The advancer unit actuates the helical mCR by translation and rotation. (E) The roller axis of the motorized advancer is tilted to push and rotate the helical mCR. Credit: ETH Zurich
Helical mCR with articulated magnetic tip. (A) The helical protrusion on the outer surface of the continuum robot, upon rotation, pushes the robot tip forward. (B) The segmented articulating magnetic tip increases the magnetic volume and decreases bending stiffness for improved steerability. (C) The helical robot prevents buckling and (D) overcomes tortuous vessels. (E) The articulating tip allows for large tip deflections. Credit: ETH Zurich
Workspace and helix effectiveness measurement of the helical mCR. (A) A sweep of parameters and tip tracking reveal the reachable workspace at different magnetic field magnitudes. (B) The mCR reachable workspace when navigating the supraaortic arteries and actuated by a three-coiled eMNS. (C) The flat vessel model with interchangeable lumen material: PMMA, PTFE, and silicone. (D) The comparison between a helical device actuated by rotation in a clockwise direction and a device without helical protrusion, actuated by translation and rotation. The helix engages with the soft material and, when rotated, generates a forward pushing force. (E) The helix effectiveness: The continuum robot is inserted as far as possible into three tortuous vessel models with three different materials for different engagement levels (PMMA, PTFE, and silicone). For each model, the mCR is inserted in three ways, first by pushing only, then while rotating counterclockwise, and lastly while rotating clockwise. Credit: ETH Zurich
Helical mCR and advancer design. (A) A magnified view of the guidewire helical mCR with a tapered nitinol core (red) for stiffness optimization. (B) A magnified view of the microcatheter helical mCR with working channel (red) for fluid injection. (C) The helical mCR has a flexible, magnetic tip with articulating links and a helical protrusion on its outer surface. (D) The advancer unit actuates the helical mCR by translation and rotation. (E) The roller axis of the motorized advancer is tilted to push and rotate the helical mCR. Credit: ETH Zurich
The team involved developed a screw-shaped robot small enough to fit inside tiny blood vessels. Application of an external magnet causes the robot to rotate, propelling itself forward. The team added a soft tip at the front of the robot to prevent damage to blood vessels.
The robot, the team believes, could be used to move through blood vessels rapidly until reaching a blockage—it could also be inserted much closer to the brain. Upon reaching the blockage, the robot could be used to drill through the material causing the backup, allowing blood to once again pass through.
Thus far, the team has tested their robot on silicon models, a human placenta in their lab, and in a living pig. The robot has performed well enough to continue testing, with the goal of treating human patients sometime in the near future.
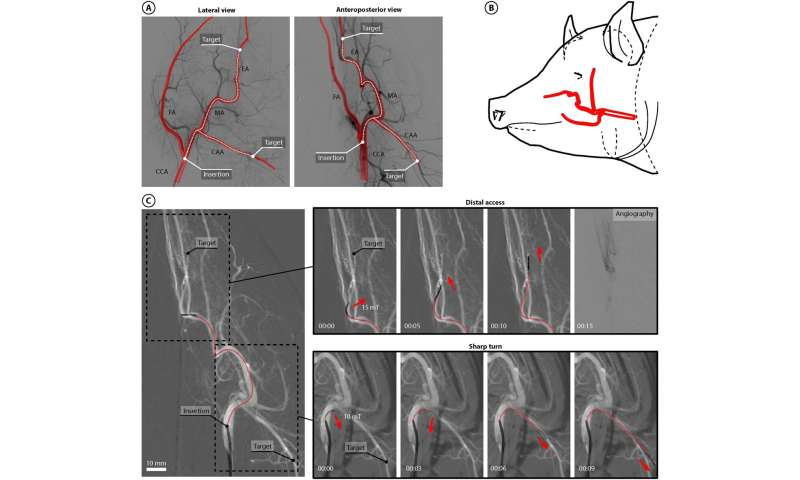
In vivo navigation. (A) Lateral and anteroposterior view of the pig’s vascular anatomy. (B) 3D representation of the pig’s vascular anatomy. (C) In vivo navigation in millimeter-sized vessels with injection of contrast agent (angiography) and steering at low magnetic fields (10 mT), with more than 90° turn. Credit: ETH Zurich
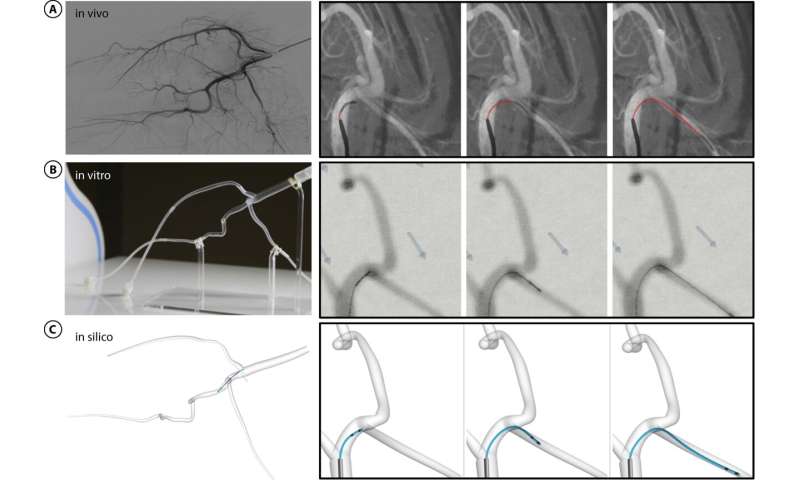
Side-by-side comparison of in vivo, in vitro, and in silico navigation. (A) In vivo navigation. It serves as a ground truth for the simulated navigations. (B) In vitro navigation. (C) In silico navigation. Credit: ETH Zurich
In vivo navigation. (A) Lateral and anteroposterior view of the pig’s vascular anatomy. (B) 3D representation of the pig’s vascular anatomy. (C) In vivo navigation in millimeter-sized vessels with injection of contrast agent (angiography) and steering at low magnetic fields (10 mT), with more than 90° turn. Credit: ETH Zurich
Side-by-side comparison of in vivo, in vitro, and in silico navigation. (A) In vivo navigation. It serves as a ground truth for the simulated navigations. (B) In vitro navigation. (C) In silico navigation. Credit: ETH Zurich
More information: R. Dreyfus et al, Dexterous helical magnetic robot for improved endovascular access, Science Robotics (2024). DOI: 10.1126/scirobotics.adh0298
Journal information: Science Robotics
© 2024 Science X Network






Post comments